1D kernel basics#
This example will cover:
Initialising the GPtide class with a kernel and some 1D data
Sampling from the prior
Making a prediction at new points
Sampling from the conditional distribution
[1]:
from gptide import cov
from gptide.gpscipy import GPtideScipy
import numpy as np
import matplotlib.pyplot as plt
We use an exponential-quadratic kernel with a length scale \(\ell\) = 100 and variance \(\eta\) = \(1.5^2\). The noise (\(\sigma\)) is 0.5. The total length of the domain is 2500 and we sample 100 data points.
[2]:
####
# These are our kernel input parameters
noise = 0.5
η = 1.5
ℓ = 100
covfunc = cov.expquad_1d
###
# Domain size parameters
dx = 25.
N = 100
covparams = (η, ℓ)
# Input data points
xd = np.arange(0,dx*N,dx)[:,None]
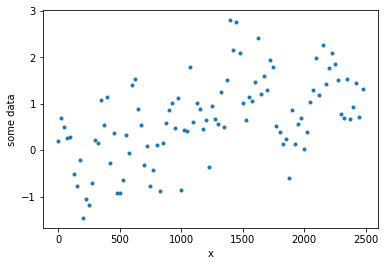
Initialise the GPtide object and sample from the prior#
[3]:
GP = GPtideScipy(xd, xd, noise, covfunc, covparams)
# Use the .prior() method to obtain some samples
yd = GP.prior(samples=1)
plt.figure()
plt.plot(xd, yd,'.')
plt.ylabel('some data')
plt.xlabel('x')
[3]:
Text(0.5, 0, 'x')
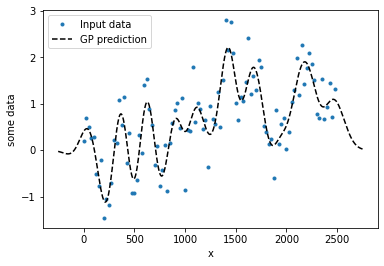
Make a prediction at new points#
[4]:
# Output data points
xo = np.linspace(-10*dx,dx*N+dx*10,N*10)[:,None]
# Create a new object with the output points
GP2 = GPtideScipy(xd, xo, noise, covfunc, covparams)
# Predict the mean
y_mu = GP2(yd)
plt.figure()
plt.plot(xd, yd,'.')
plt.plot(xo, y_mu,'k--')
plt.legend(('Input data','GP prediction'))
plt.ylabel('some data')
plt.xlabel('x')
[4]:
Text(0.5, 0, 'x')
Make a prediction of the full conditional distribution at new points#
[5]:
samples = 100
y_conditional = GP2.conditional(yd, samples=samples)
plt.figure()
plt.plot(xd, yd,'.')
plt.plot(xo, y_mu,'k--')
for ii in range(samples):
plt.plot(xo[:,0], y_conditional[:,ii],'0.5',lw=0.2, alpha=0.2)
plt.legend(('Input data','GP prediction','GP conditional'))
[5]:
<matplotlib.legend.Legend at 0x18a6d743b80>
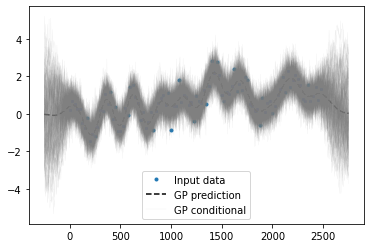
You can see from above how the mean prediction returns to zero in the extrapolation region whereas the conditional samples reverts to the prior i.e. it goes all over the place.